伺服电动缸从外形结构上可分为两种,直线式、平行式。
1、直连式电动缸
直线式电动缸集成了伺服电机、伺服驱动器、高精度滚珠丝杆、模块化规划等技能,整个电动缸结构紧凑。伺服电机与电动缸的传动丝杆通过特别联轴器相联接,使伺服电机的编码器直接反响电动缸的活塞杆位移量,减少了中间环节的惯量和空地,提高了控制性和控制精度。
伺服电机与电动缸整体相连,设备容易、设定简单。电动缸的主要零部件均选用国内外优质产品,功用安稳、故障率低、可靠性高。
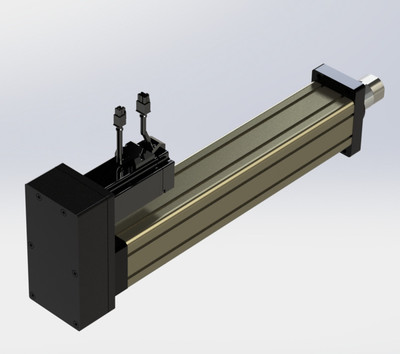
2、并联式电动缸
平行式电动缸的电机与缸体部分平行设备,通过同步带及同步带轮与电动缸的传动丝杆相联接,除具有直线式电动缸的特点外,并因为总长短,在设备位置比较小的场合比较习气。一起平行式电动缸选用的同步带,具有强度高、空地小、寿命长等特点,使整个电动缸具有较高的控制性和控制精度。
3、三自由度运动途径
三自由度运动途径系统由三自由度运动途径、微型控制器、伺服驱动系统等组成。三自由度运动途径的下途径设备在地面上,上途径为运动途径,它由三只电动缸和三个防扭臂支承,运动途径与电动缸选用三个虎克铰联接,电动缸与固定基座选用三个虎克铰联接。
三只电动缸选用伺服电机驱动的电动缸。计算机控制系统通过位姿—缸长解算,通过驱动伺服电机改动电动缸缸长,以完结运动途径的三自由度运动途径,即笛卡尔坐标系内的Z轴上下升降运动和绕X轴和Y轴两个坐标轴的翻滚。
4、六自由度运动途径
服务途径系统软件由选用Stewart安排的六自由度健身运动服务途径、小型控制板、伺服电机驱动器系统软件等构成。六自由度健身运动服务途径)的下服务途径安裝在路面上,上服务途径为健身运动服务途径,它由六只电动缸支撑板。
健身运动服务途径与电动缸选用六个虎克铰连,电动缸与固定基座选用六个虎克铰联接,六只电动缸选用伺服电机驱动的电动缸。计算机控制系统通过位姿-缸长解算,通过驱动伺服电机改动电动缸缸长,以完结运动途径的六个自由度的运动,即笛卡尔坐标系内的三个平移运动和绕三个坐标轴的翻滚。
 咨询电话:17328324199
咨询电话:17328324199 


 全国免费客服电话 17328324199
全国免费客服电话 17328324199